Drone FC - carte controlleur

J'aime 0
Compare
Lien | APM 2.6 | PX4 FMU | Pixhawk | CopterControl3D Platform (CC3D) | Revolution Platform (REVO) | Naza-M | Naza-M Lite | Naza-M v2 | Wookong-M | A2 | MikroKopter Flight-Ctrl | Crius All In One PRO | KK-Copter | AeroQuad 32 | AutoQuad v6.6 | Crius MultiWii Lite | Crius MultiWii SE | Free Flight | FY-30A | Gaui GU-344 | HoverflyPRO | HoverflySPORT | Hobbyking KK2.0 | MultiWii PRO / MTK GPS | MultiWii PRO 2.0 / MTK GPS | Paris MultiwiiCopter | Quadrino ZoomFlight | Rabbit | SmartAP Autopilot | TMF Pro FH-X46 AQ50 | UAVP/UAVX | XAircraft FC1212-P | Zero UAV YS-X6 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Picture | 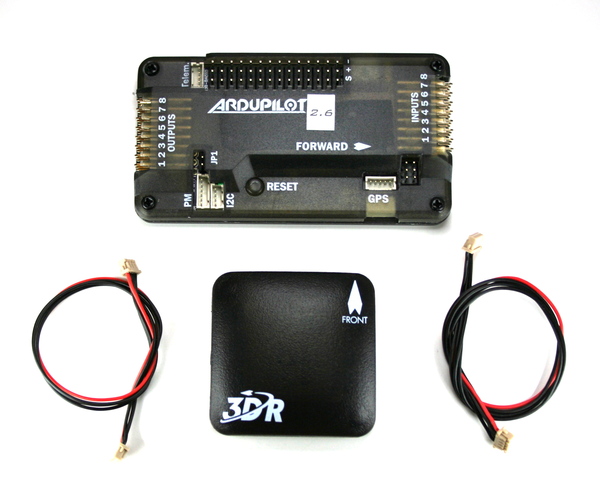 |  |  |  |  |  |  |  |  |  | |||||||||||||||||||||||
| Marque | 3drobotics | 3drobotics | 3drobotics | OpenPilot (OP) | OpenPilot (OP) | DJI | DJI | DJI | DJI | DJI | |||||||||||||||||||||||
| Prix | 239,98 $ (FC + GPS) | 149 $ | 199 $ | 399 € NAZA-M V2 + GPS V2 + BTU + iOSD mini | 983,9 € Wookong-M avec GPS V2 + iOSD Mark II + Led Bluetooth | 948,8 € FC+NC+GPS + WI232 +OSD | 74,24 € Crius AIO pro+GPS +Minim OSD + Bluetooth | 23 € KK-2.0 LCD | |||||||||||||||||||||||||
| Site web | 3drobotics.com/... | ||||||||||||||||||||||||||||||||
| CARACTERISTIQUES | |||||||||||||||||||||||||||||||||
| Accessibilité/Facilité montage et prog | Moyen Montage 18/20 Prog 14/20 Interface OK mais pleins d'options | Facile Montage 18/20 Prog 18/20 | Facile Montage 18/20 Prog 17/20 Un peu plus d'options que sur le Naza | Difficile Montage 12/20 Prog 12/20 montage soigné nécessaire vole bien avec les réglages par défaut mais pleins pleins d'options | Moyen Montage 16/20 Prog 11/20 montage simple mais prog un peu compliquée | Facile Montage 18/20 Prog 20/20 la meilleure: y en a pas | |||||||||||||||||||||||||||
| Dimension | 66,42x40,64mm | ||||||||||||||||||||||||||||||||
| Poids | |||||||||||||||||||||||||||||||||
| stockage port | No | ||||||||||||||||||||||||||||||||
| Camera stabilisation built-in | 2 servos | ||||||||||||||||||||||||||||||||
| Wiki | aucune note | aucune note | aucune note | aucune note | aucune note | aucune note | aucune note | aucune note | aucune note | aucune note | aucune note | aucune note | aucune note | aucune note | aucune note | aucune note | aucune note | aucune note | aucune note | aucune note | aucune note | aucune note | aucune note | aucune note | aucune note | aucune note | aucune note | aucune note | aucune note | aucune note | aucune note | aucune note | aucune note |
| 3D plans | No | ||||||||||||||||||||||||||||||||
| Open source communication protocol | Yes (Mav Link) | ||||||||||||||||||||||||||||||||
| Drone configuration | Tricopter Quad +, X Hexa +, X, Y6 OctoCopter in V, +, X, X8 | ||||||||||||||||||||||||||||||||
| Hardware | |||||||||||||||||||||||||||||||||
| Internal RAM for datalogging | 4 Mb onboard | ||||||||||||||||||||||||||||||||
| Connectique | micro-USB | ||||||||||||||||||||||||||||||||
| Ports | I2C; GPS port; Telemetrie port; Power Module; Compass port; | ||||||||||||||||||||||||||||||||
| Micro Controller Unit (MCU) | |||||||||||||||||||||||||||||||||
| modele | ATMEGA 2560 | ||||||||||||||||||||||||||||||||
| architecture bits | 8 | ||||||||||||||||||||||||||||||||
| fréquence MHz | 16 | ||||||||||||||||||||||||||||||||
| Flash size kB | 256 | ||||||||||||||||||||||||||||||||
| Internal RAM kB | 8 | ||||||||||||||||||||||||||||||||
| FPU (floating-point unit) | no | ||||||||||||||||||||||||||||||||
| Sensors | |||||||||||||||||||||||||||||||||
| Gyro | 3-axis MEMs MPU6000 | ||||||||||||||||||||||||||||||||
| Acc | 3-axis MEMs MPU6000 | ||||||||||||||||||||||||||||||||
| Barometre pressure | MS5611-01BA03 | ||||||||||||||||||||||||||||||||
| Magnetometre-compass | Built-in with GPS: Honeywell's HMC5883L | ||||||||||||||||||||||||||||||||
| Software | |||||||||||||||||||||||||||||||||
| Telemetrie PC/Mac | OUI Windows | OUI | OUI | OUI Windows | OUI Windows Mac | NON | |||||||||||||||||||||||||||
| Application Iphone/android | OUI Android | OUI IOS | OUI IOS | OUI Android+ IOS | OUI Android | NON | |||||||||||||||||||||||||||
| Wireless configuration | Yes (radio telemetry) | OUI Led Bluetooth | OUI Led Bluetooth | OUI avec Xbee/wi232/Bluetooth extender | OUI 3DR 433/900Mhz, Bluetooth ou Bluetooth extender | non | |||||||||||||||||||||||||||
| Opensource tools & code | Yes | ||||||||||||||||||||||||||||||||
| Name | Mission Planner | ||||||||||||||||||||||||||||||||
| Platform | Windows | ||||||||||||||||||||||||||||||||
| Flight mode | |||||||||||||||||||||||||||||||||
| Altitude control | 15/20 | 20/20 | 20/20 | OUI 20/20 après la mise a jour ACC | OUI 12/20 | NON | |||||||||||||||||||||||||||
| Manual | Yes | ||||||||||||||||||||||||||||||||
| Stabilized | yes | ||||||||||||||||||||||||||||||||
| AltitudeHold | yes | ||||||||||||||||||||||||||||||||
| VelocityControl - carefree | yes | ||||||||||||||||||||||||||||||||
| PositionHold | yes | ||||||||||||||||||||||||||||||||
| GPS | |||||||||||||||||||||||||||||||||
| Built-in | No | ||||||||||||||||||||||||||||||||
| GPS recommended | 3DR GPS uBlox LEA-6 with Compass | ||||||||||||||||||||||||||||||||
| Failsafe | Yes | ||||||||||||||||||||||||||||||||
| return to home (RTH) RTL | Yes | ||||||||||||||||||||||||||||||||
| Full autonomy | Yes | ||||||||||||||||||||||||||||||||
| Waypoints | 166 | ||||||||||||||||||||||||||||||||
| In-Flight route editing | Yes | ||||||||||||||||||||||||||||||||
| Geo-fence support | Yes | ||||||||||||||||||||||||||||||||
| Robust simulation (HIL/SIL) | Both | ||||||||||||||||||||||||||||||||
| Mise à jour | 18 oct. 2013 08:20:18 | 18 oct. 2013 08:20:18 | 18 oct. 2013 08:20:18 | 18 oct. 2013 08:20:18 | 18 oct. 2013 08:20:18 | 18 oct. 2013 08:04:37 | 18 oct. 2013 08:04:37 | 18 oct. 2013 08:04:37 | 18 oct. 2013 08:04:37 | 18 oct. 2013 08:04:37 | 18 oct. 2013 08:20:18 | 18 oct. 2013 08:20:18 | 18 oct. 2013 07:56:15 | 18 oct. 2013 08:20:18 | 18 oct. 2013 08:20:18 | 18 oct. 2013 08:20:18 | 18 oct. 2013 08:20:18 | 18 oct. 2013 08:20:18 | 18 oct. 2013 08:20:18 | 18 oct. 2013 08:20:18 | 18 oct. 2013 08:20:18 | 18 oct. 2013 08:20:18 | 18 oct. 2013 08:20:18 | 18 oct. 2013 08:20:18 | 18 oct. 2013 08:20:18 | 18 oct. 2013 08:20:18 | 18 oct. 2013 08:20:18 | 18 oct. 2013 08:20:18 | 18 oct. 2013 08:20:18 | 18 oct. 2013 08:20:18 | 18 oct. 2013 08:20:18 | 18 oct. 2013 08:20:18 | 18 oct. 2013 08:20:18 |

Avis utilisateurs et commentaires